回答 · The Answer
三条元原则
14 项消耗散落, 但回答只有 3 条原则。每条 spec / 决策 / 投入都必须同时通过这 3 把尺。
M1 · 设计起点
操作者还剩多少
具身感 + 认知负荷
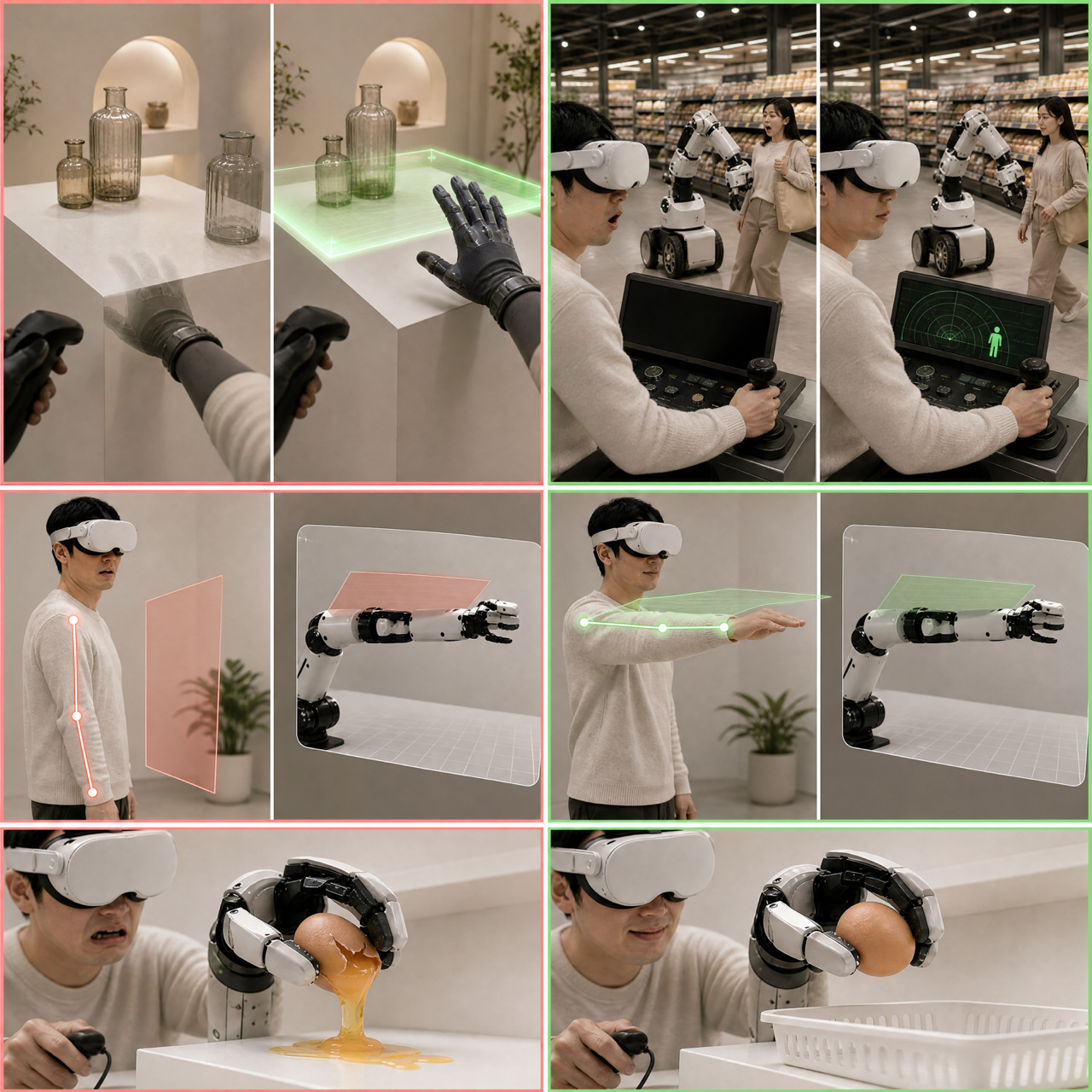
不是"机器人长什么样"。是 操作者还能不能像自然状态下那样长时间低认知负荷工作。
每条 spec 必须回答两个问题:
- ① 它如何提升 sense of embodiment (具身感)?
- ② 它如何降低 cognitive load (认知负荷)?
反哺到 14 项: #1 #2 #4 #5 #6 #11 #12 #13 直接对接。

M2 · 双场景 KPI 矩阵
每条 spec 必须
同时在两列过线
日常 (美超实操) 与极端 (WRC 比赛 / 强 EM 干扰) 共用一张表, 不允许 "demo OK 但比赛挂"。
| 维度 | 日常 | 极端 |
|---|---|---|
| 图像延迟 | < 200 ms | 同上 + 可降级 |
| 图像 jitter | P99 ≤ 20 ms | ≥ 5 ms P99 即不合格 |
| 通信链路 | 单 4G/WiFi | ≥ 2 物理介质冗余 |
| 触觉延迟 | < 30 ms 本地闭环 | 公网下 transparency 降级 |
| 远程上电 | optional | 必须 (无人现场) |
反哺 #6 时序 · #10 全身控制

M3 · 挖坑哲学
系统集成
才是仓颉的护城河
子系统 SOTA (State of the Art, 最优) = 别人替我们打的工:
PHANToM · Force Dimension · SenseGlove · DLR 阻抗控制 · mmWave 雷达 · ZED 双目 · Lawrence 1993 transparency · Anderson-Spong 1989 wave variables · Mitra-Niemeyer 2008 model-mediated · ...
系统集成 = 空白。把分散在 30 个 lab 里的 SOTA 第一次拼成产品的人, 才是仓颉。
目标产物: 让操作者具身感不被打断 + 认知负荷可承受 + 远程无人干预可运维 的产品。
反哺 #3 #7 #8 #9 #14 · 任何子系统级竞品都不会自己解掉这些